《平面四桿機(jī)構(gòu)動(dòng)力學(xué)分析.ppt》由會(huì)員分享�����,可在線閱讀����,更多相關(guān)《平面四桿機(jī)構(gòu)動(dòng)力學(xué)分析.ppt(28頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
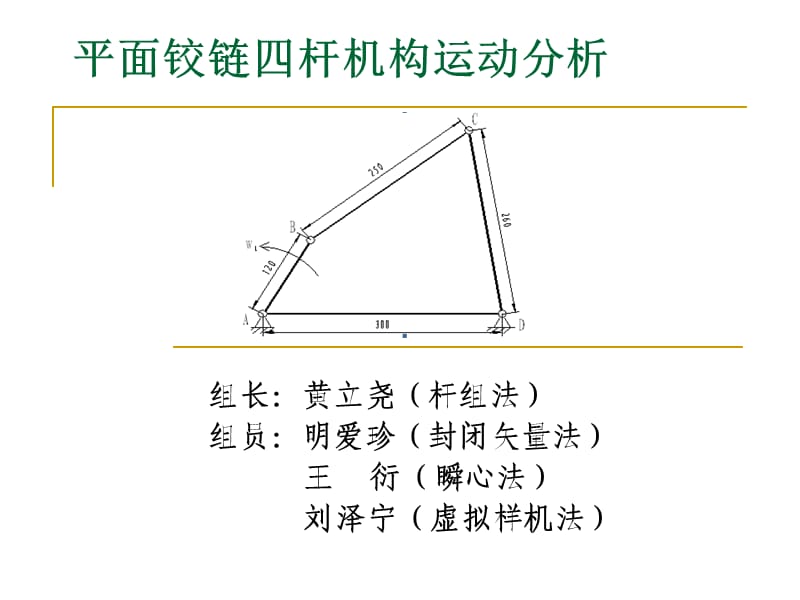
1�、平面鉸鏈四桿機(jī)構(gòu)運(yùn)動(dòng)分析,組長:黃立堯(桿組法) 組員:明愛珍(封閉矢量法) 王 衍(瞬心法) 劉澤寧(虛擬樣機(jī)法),已知條件,已知條件:AB=120,BC=250����,CD=260,AD=300�����,桿AB的轉(zhuǎn)速 求:桿CD的角位置 ���、角速度 和角加速度 ��。,建立如上圖所示坐標(biāo)系���,假設(shè)初始時(shí)刻桿1處于水平位置。,桿組法,取桿2���、3和B����、C、D三個(gè)轉(zhuǎn)動(dòng)副組成RRR桿組����,如 下圖所示。,由已知條件可得: 各桿桿長: ���, �, B點(diǎn)的位置坐標(biāo): ���,,B點(diǎn)速度: �, B點(diǎn)加速度: ����, D點(diǎn)位置坐標(biāo): , D點(diǎn)速度: ���, D點(diǎn)加速度
2�����、: �,,桿組法,1.角位置分析,RRR桿組的裝配條件為: 式中, 桿2的角位移為:,式中�����,,式中的“”表明 有兩個(gè)解�����。一個(gè)是 位置的解��,一個(gè) 是圖中 位置的解����。,桿組法,轉(zhuǎn)動(dòng)副C的位置矢量為: XY軸投影方程為: C點(diǎn)的位置坐標(biāo)為: 由坐標(biāo)關(guān)系得桿3的角位移為:,桿組法,2.角速度分析 對(duì)下式求導(dǎo)�����,整理得桿3的角速度 :,桿組法,3.角加速度分析 對(duì)下式兩次求導(dǎo)��,整理得桿3的角加速度 : 式中����,,桿組法,從0 取值,每 取一個(gè)點(diǎn)�,將上述已知條件帶入角位置 、角速度 和角加速度 的表達(dá)式后的結(jié)果 如下圖所示:,桿組法,封閉矢量法,1.創(chuàng)建矢量 以矢量l1
3、���、 l2����、 l3 和l0來表示各構(gòu)件�。 X 軸正方向與各矢量的 正方向的夾角設(shè)為qi (i=1,2,3,0)。,2.建立位移方程,封閉矢量法,3.求解位移方程 整理得: 式中,封閉矢量法,解方程 ���,得: 式中: 稱為型參數(shù)�。 同理得到:,封閉矢量法,4.角速度方程(位移方程一介導(dǎo)) 解方程得:,封閉矢量法,5.角加速度方程(位移方程二介導(dǎo)) 解方程得:,封閉矢量法,從0 取值����,每 取一個(gè)點(diǎn),將上述已知條件帶入角位置 �����、角速度 和角加速度 的表達(dá)式后的結(jié)果 如下圖所示:,封閉矢量法,瞬心法,1.瞬心的概念 兩個(gè)構(gòu)件1�,2做平面相對(duì)運(yùn)動(dòng)時(shí),在任
4�����、何一瞬時(shí),都 可以認(rèn)為它們是繞某一重合點(diǎn)做相對(duì)轉(zhuǎn)動(dòng)�����。這個(gè)重合點(diǎn)就 是速度瞬心(如下圖)�。 三心定律 :三個(gè)做平面運(yùn)動(dòng)的構(gòu)件共有三個(gè)瞬心����,且它們位于同一條直線上。,瞬心法,2.瞬心法求解 選取AB連續(xù)轉(zhuǎn)動(dòng)一周之間每隔30的12個(gè)位置來求解CD桿的位置和角速度���。繪制CAD圖如下:,瞬心法,選取60位置為例易 知��,桿件1和桿件2的瞬心 為 即B點(diǎn)����。桿件2與3����、 3與4、4與1的瞬心分別 為 ����, , 。由三 心定律可知��,桿件1和桿 件3的瞬心必在直線BC上��, 也必在直線AD上����。所以 其交點(diǎn)即為 。,瞬心法,由速度瞬心法得: 即 計(jì)算得:,顯然����,只要測(cè)出 的長度即可計(jì)算出構(gòu)件3的角
5、速度 ���,角位移 可以直接測(cè)量出�。,瞬心法,用上述方法可求出12個(gè)位置處構(gòu)件3的角位置和角加速 度���,如下表:,瞬心法,根據(jù)上表可繪制出�����,角位置 ����、角速度 隨時(shí)間 的變化,如下圖:,虛擬樣機(jī)法,根據(jù)題目要求��,將AB桿的初始位置從零角開始�����,建立 Adams模型�,并且施加約束,給AB桿施加1rad/s的運(yùn)動(dòng)�,PI/180d*time, 如下圖:,虛擬樣機(jī)法,在原點(diǎn)處建立一個(gè)marker點(diǎn)��,作為CD桿角度測(cè)量的依據(jù)���,建立測(cè)量���,分別生成CD桿的角位置和角速度的測(cè)量曲線,仿真后處理模塊繪出曲線(如下圖)�����。,四種方法對(duì)比,桿組法,封閉矢量法,瞬心法,虛擬樣機(jī)法,四種方法對(duì)比,桿組法,封閉矢量法,瞬心法,虛擬樣機(jī)法,四種方法對(duì)比,桿組法,封閉矢量法,虛擬樣機(jī)法,不足之處敬請(qǐng)指正��!,謝謝��!,
 平面四桿機(jī)構(gòu)動(dòng)力學(xué)分析.ppt
平面四桿機(jī)構(gòu)動(dòng)力學(xué)分析.ppt