《自動(dòng)控制原理胡壽松第5版課后習(xí)題及答案完整.doc》由會(huì)員分享���,可在線閱讀���,更多相關(guān)《自動(dòng)控制原理胡壽松第5版課后習(xí)題及答案完整.doc(106頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
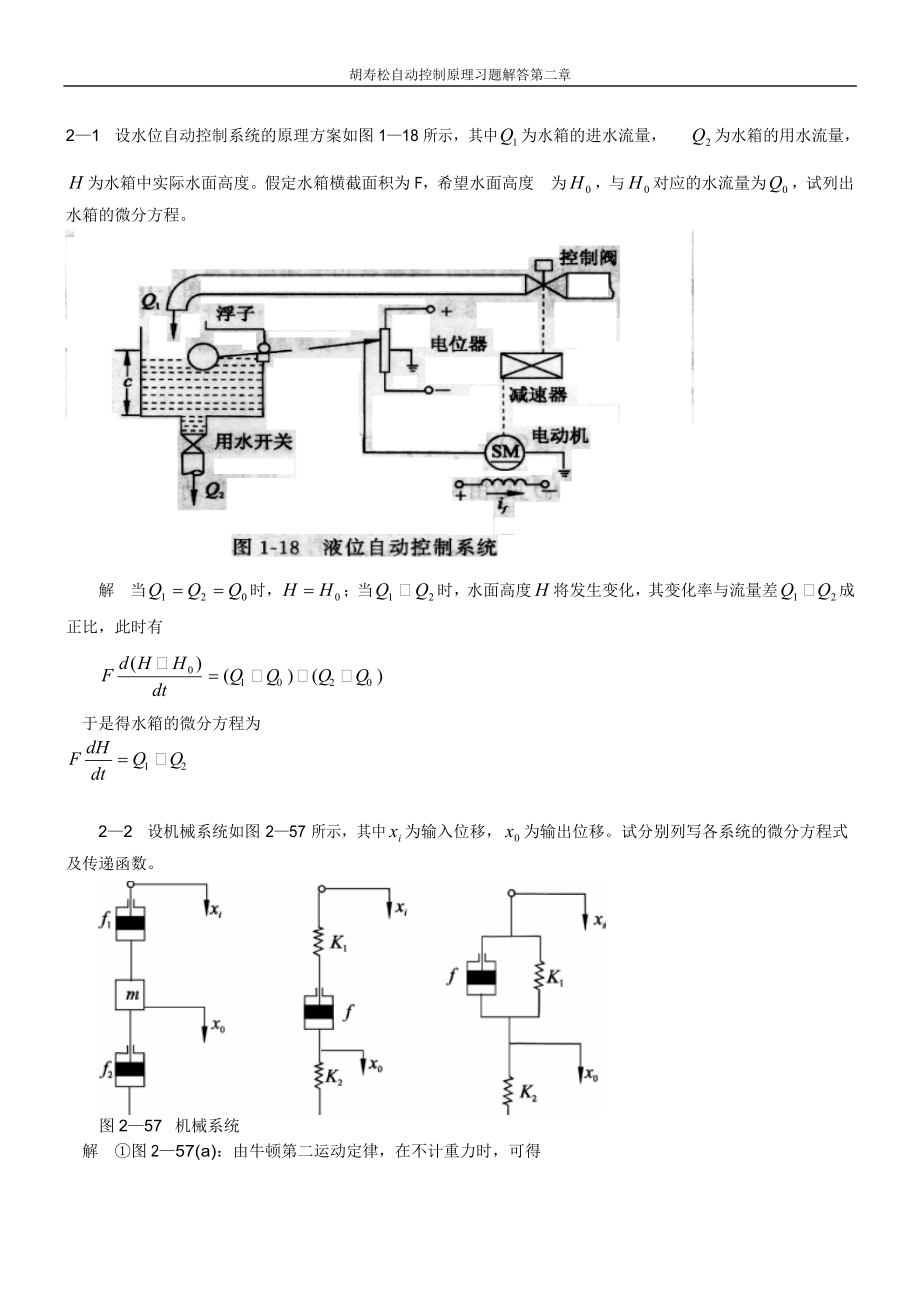
1���、胡壽松自動(dòng)控制原理習(xí)題解答第二章21設(shè)水位自動(dòng)控制系統(tǒng)的原理方案如圖 118 所示���,其中 Q1 為水箱的進(jìn)水流量���,Q2 為水箱的用水流量,H 為水箱中實(shí)際水面高度���。假定水箱橫截面積為 F���,希望水面高度為 H 0 ,與 H 0 對(duì)應(yīng)的水流量為 Q0 ���,試列出水箱的微分方程���。解當(dāng) Q1 = Q2 = Q0 時(shí),H = H 0 ���;當(dāng) Q1 Q2 時(shí)���,水面高度 H 將發(fā)生變化,其變化率與流量差 Q1 Q2 成正比���,此時(shí)有F d (H H 0 ) = (Q Q ) (Q Q )dt1020于是得水箱的微分方程為F dH = Q Qdt1222設(shè)機(jī)械系統(tǒng)如圖 257 所示���,其中 xi 為輸入位移���, x0
2、為輸出位移���。試分別列寫各系統(tǒng)的微分方程式及傳遞函數(shù)���。圖 257機(jī)械系統(tǒng)解圖 257(a):由牛頓第二運(yùn)動(dòng)定律,在不計(jì)重力時(shí)���,可得f1 ( x&i x&0 ) f 2 x&0 = m&x&0整理得2m d x0 + ( f+ f ) dx0 = fdxidt 212dt1 dt將上式進(jìn)行拉氏變換���,并注意到運(yùn)動(dòng)由靜止開始,即初始條件全部為零���,可得1ms 2 + ( f+ f 2)sX0 (s) =f1 sX i(s)于是傳遞函數(shù)為X 0 (s) =X i (s)f1ms + f1 + f 2圖 257(b):其上半部彈簧與阻尼器之間,取輔助點(diǎn) A���,并設(shè) A 點(diǎn)位移為 x ���,方向朝下;而在其下半部工
3���、���。 引出點(diǎn)處取為輔助點(diǎn) B���。則由彈簧力與阻尼力平衡的原則,從 A 和 B 兩點(diǎn)可以分別列出如下原始方程:K1 ( xi x) =f ( x& x&0 )K 2 x0 =f ( x& x&0 )消去中間變量 x���,可得系統(tǒng)微分方程f (K+ K ) dx0 + K K x= K fdxi12dt12 01dt對(duì)上式取拉氏變換���,并計(jì)及初始條件為零,得系統(tǒng)傳遞函數(shù)為X 0 (s) =X i (s)fK1 sf (K1 + K 2 )s + K1 K 2圖 257(c):以 x0 的引出點(diǎn)作為輔助點(diǎn)���,根據(jù)力的平衡原則���,可列出如下原始方程:K1 ( xi x) + f ( x&i x&0 ) = K 2
4、x0移項(xiàng)整理得系統(tǒng)微分方程f dx0 + (Kdt1+ K 2) x0 =f dxidt+ K1 xi對(duì)上式進(jìn)行拉氏變換���,并注意到運(yùn)動(dòng)由靜止開始���,即xi (0) = x0 (0) = 0則系統(tǒng)傳遞函數(shù)為X 0 (s) =X i (s)fs + K1fs + (K1 + K 2 )2-3 試證明圖2-58()的電網(wǎng)絡(luò)與(b)的機(jī)械系統(tǒng)有相同的數(shù)學(xué)模型。圖 2-58電網(wǎng)絡(luò)與機(jī)械系統(tǒng)1R11 C sRR解:(a):利用運(yùn)算阻抗法得: Z= R /= 1 = 1 = 1 11C sR C s +T s +1R1+ 1C1 s1 1111Z 2 = R2+ 1C2 s= 1C2 s(R2 C2s + 1
5���、) =1C2 s(T2 s + 1)U (s)Z1(T2 s + 1)C s(T s + 1)(T s + 1)所以: 0 = 2 = 2 = 1 2 U i (s)Z1 + Z 2R1+T1 s + 11C2 s(T2 s + 1)R1C2 s + (T1 s + 1)(T2 s + 1)(b)以 K1 和 f1 之間取輔助點(diǎn) A���,并設(shè) A 點(diǎn)位移為 x ���,方向朝下;根據(jù)力的平衡原則���,可列出如下原始方程:K 2 ( xi x0 ) + f 2 ( x&i x&0 ) =f1 ( x&0 x&)(1)K1 x =f1 ( x&0 x&)(2)所以 K 2 ( xi x0 ) + f 2 ( x
6���、&i x&0 ) = K1 x對(duì)(3)式兩邊取微分得K 2 ( x&i x&0 ) + f 2 (&x&i &x&0 ) = K1 x&將(4)式代入(1)式中得(3)(4)K1 K 2 ( xi x0 ) + K1 f 2 ( x&i x&0 ) = K1 f1 x&0 f1 K 2 ( x&i x&0 ) f1 f 2 (&x&i &x&0 )整理上式得f1 f 2 &x&0 + f1 K 2 x&0 + K1 f1 x&0 + K1 f 2 x&0 + K1 K 2 x0= f1 f 2 &x&i + f1 K 2 x&i + K1 f 2 x&i + K1 K 2 xi對(duì)上式去拉氏變換
7、得12f f112s 2 + ( f K2+ K1 f1+ K10f 2 )s + K1 K 2X (s)12= ff s 2 + ( f K+ K1f 2 )s + K1 K 2 Xi(s)所以:X 0 (s) =22f1 f 2 s+ ( f1 K 2 + K1 f 2 )s + K1 K 2f1 f 2K1 K 2=s 2 + ( f1K1+ f 2 )s + 1K 2X i (s)f1 f 2 s+ ( f1 K 2 + K1 f1 + K1 f 2 )s + K1 K 2f1 f 2K1 K 2s 2 +( f1K1+ f 2 )s + 1 + f1K 2K 2( f1K=1s +
8���、1)( f 2K 2s + 1)( f1K1s + 1)( f 2K 2s + 1) + f1K 2所以圖 2-58()的電網(wǎng)絡(luò)與(b)的機(jī)械系統(tǒng)有相同的數(shù)學(xué)模型���。24 試分別列寫圖 2-59 中個(gè)無源網(wǎng)絡(luò)的微分方程式。解:(a) :列寫電壓平衡方程:duCuCui u0 = uCiC = CdtduCuC iR1 =R1R1d (ui u0 )ui u0 u0 = (iC + iR1 )R2 = C+ R2 = C+ R2整理得:dtR1 dtR1CR du0 + C R20+ 1u= CRdui+ C R2 u2 dtR12 dti(b) :列寫電壓平衡方程:duC1ui u0 = uC1
9���、(1)iC1 = C1dt(2)iC 2 =uC1 + iC1 R R+ iC1 =uC1R+ 2iC1 = C2duC 2dt= C2d (u0 iC1 R)dt(3)即: uC1R+ 2iC1 = C2d (u0 iC1 R)dt2(4)將(1)(2)代入(4)得:ui u0 + 2Cd (ui u0 ) = Cdu0 C CR d uC1R1dt2 dt1 2dt 2uudududud 2 ud 2 u即: i 0 + 2C i 2C 0 = C 0 C CR i + C CR 0 RR整理得:1 dt1 dt2 dt1 2dt 21 2dt 22C C R d u0CCdu0u0C C
10、 R d uiuiC dui1 2dt 2+ ( 2 + 21 ) dt + R =1 22dt 2+ 2R1 dt2-5 設(shè)初始條件均為零���,試用拉氏變換法求解下列微分方程式���,并概略繪制x(t)曲線���,指出各方程式的模態(tài)。(1)2 x&(t ) + x(t ) = t;解:對(duì)上式兩邊去拉氏變換得:(2s+1)X(s)=1/s2 X (s) =1= 1s 2 (2s + 1)s 2 1 +s42s + 1運(yùn)動(dòng)模態(tài) e 0.5t所以: x(t ) = t 2(1 e 1 t2 )() &x&(t ) + x&(t ) + x(t) = (t)���。解:對(duì)上式兩邊去拉氏變換得:(s 2 + s + 1)
11���、X (s) = 1 X (s) =1(s 2 + s + 1)=1(s + 1/ 2) 2 + 3 / 4運(yùn)動(dòng)模態(tài) et / 2t3sin 2所以: x(t ) =2 e t / 23t3sin 2(3) &x&(t ) + 2x&(t ) + x(t ) = 1(t)。解:對(duì)上式兩邊去拉氏變換得:(s 2 + 2s + 1) X (s) = 1 X (s) =s1=s(s 2 + 2s + 1)1s(s + 1) 2= 1 s1+s + 11(s + 1) 2運(yùn)動(dòng)模態(tài) e t (1 + t )所以: x(t ) = 1 e t te t= 1 e t (1 + t)2-6 在液壓系統(tǒng)管道中���,
12���、設(shè)通過閥門的流量滿足如下流量方程:Q = KP式中 K 為比例常數(shù), P 為閥門前后的壓差���。若流量 Q 與壓差 P 在其平衡點(diǎn) (Q0 , P0 ) 附近作微小變化���,試導(dǎo)出線性化方程。解:設(shè)正常工作點(diǎn)為 A���,這時(shí) Q0 = KP0在該點(diǎn)附近用泰勒級(jí)數(shù)展開近似為:y = f ( x) + df ( x) ( x x )0 dx0 x0即 Q Q0 = K1 (P P0 ) dQ 其中 K1 = dP= 1 K1002 P = PP2-7 設(shè)彈簧特性由下式描述:F = 12.65 y1.1其中���,是彈簧力���;是變形位移。若彈簧在變形位移附近作微小變化���,試推導(dǎo)的線性化方程���。解:設(shè)正常工作點(diǎn)為 A,這時(shí)
13���、F = 12.65 y1.100在該點(diǎn)附近用泰勒級(jí)數(shù)展開近似為:y = f ( x) + df ( x) ( x x )0 dx0 x0即 F F0 = K1 ( y y0 ) dF 其中0.10.1K1 = = 12.65 1.1y0= 13.915 1.1y0 dy y = y02-8 設(shè)晶閘管三相橋式全控整流電路的輸入量為控制角���,輸出量為空載整流電壓,它們之間的關(guān)系為:0ed = Edcos式中是整流電壓的理想空載值���,試推導(dǎo)其線性化方程式���。解:設(shè)正常工作點(diǎn)為 A,這時(shí) Ed= Ed 0 cos 0在該點(diǎn)附近用泰勒級(jí)數(shù)展開近似為:y = f ( x) + df ( x) ( x x )0
14���、dx0 x00即 ed Edcos 0 = K s ( 0 )s其中 K = ded d= Ed 0 sin 0 =2-9 若某系統(tǒng)在階躍輸入r(t)=1(t)時(shí)���,零初始條件下的輸出響應(yīng) c(t) = 1 e 2t + e t ,試求系統(tǒng)的傳遞函數(shù)和脈沖 響應(yīng)���。解:對(duì)輸出響應(yīng)取拉氏變換的:C (s) = 1 1+1=s 2 + 4s + 2因?yàn)椋?C (s) = (s)R(s) = 1 (s)ss + 2s + 1s(s + 1)(s + 2)s所以系統(tǒng)的傳遞函數(shù)為: (s) =s 2 + 4s + 2 (s + 1)(s + 2)= 1 +s(s + 1)(s + 2)= 1 1+s + 1
15���、2s + 2系統(tǒng)的脈沖響應(yīng)為: g (t ) = (t) e t + e 2t2-10 設(shè)系統(tǒng)傳遞函數(shù)為C (s)=R(s)2s 2 + 3s + 2且初始條件 c(0)=-1, c& (0)。試求階躍輸入 r(t)=1(t)時(shí)���,系統(tǒng)的輸出響應(yīng) c(t)���。解:由系統(tǒng)的傳遞函數(shù)得:2d c(t) + 3 dc(t) + 2c(t ) = 2r (t )(1)dt 2dt對(duì)式(1)取拉氏變換得:s 2 C (s) sc(0) c&(0) + 3sC (s) 3c(0) + 2C (s) = 2R(s)將初始條件代入(2)式得(s 2 + 3s + 2)C (s) + s + 3 = 2 1s(2)
16、即: C (s) =2 s 2 3s=s(s 2 + 3s + 2)2 2s + 6ss 2 + 3s + 2= 1 s4+s + 12s + 2所以: c(t) = 2 4e t + 2e 2t2-11 在圖 2-60 中���,已知和兩方框相對(duì)應(yīng)的微分方程分別是6 dc(t ) + 10c(t) = 20e(t )dt20 db(t) + 5b(t ) = 10c(t)dt且初始條件均為零���,試求傳遞函數(shù) C (s) / R(s) 及 E(s) / R(s)解:系統(tǒng)結(jié)構(gòu)圖及微分方程得:G(s) =206s + 10H (s) =1020s + 51020E (s) 10 10C (s) =10G(
17、s)= 6s + 10 R(s)= =1 + G(s)H (s)20 10R(s)1 + G(s)H (s)1 +20101 +6s + 10 20s + 56s + 10 20s + 510(20s + 5)(6s + 10)1200s 2 + 1500s + 5000=200(20s + 5)= = 200(20s + 5)= =(6s + 10)(20s + 5) + 200120s 2 + 230s + 250(6s + 10)(20s + 5) + 200120s 2 + 230s + 2502-12 求圖 2-61 所示有源網(wǎng)絡(luò)的傳遞函數(shù)1解:(a) Z 0 = R0 /=C sR
18���、1C0 s 1= R0T s + 1T0 = R0 C0R00 +0C0 sU 0 (s) = R1= R1 (T s + 1)RU i (s)Z 00(b) Z 0= R000/ 1=C sR1C0 s 1= R0T s + 1T0 = R0 C0R00 +0C0 s11Z = R + 1= T1 s + 1T = R CC1 sC1 s11 1U 0 (s) = Z1 = 1(T s + 1)(T s + 1)U (s)ZR C s1 0i 0 0 1Z12= R1/( R2+ 1C2 s) = R1/ T2 s + 1C2 s(c)1=R T2 s + 1C2 s= R1 (T2 s +
19���、 1)T2 = R2 C21R + T2 s + 1C2 sT2 s + R1 + 1U 0 (s) = Z12= R1T2 s + 1U i (s)R0R0 T2 s + R1 + 12-13由運(yùn)算放大器組成的控制系統(tǒng)模擬電路如圖2-62所示���,試求閉環(huán)傳遞函數(shù)U()()。圖2-62控制系統(tǒng)模擬電路解:U1 (s)= Z1(1)U 2 (s) = Z 2(2)U 0 (s) = R2 (3)U 0 (s) + U i (s)R0U1 (s)R0U 2 (s)R0式(1)(2)(3)左右兩邊分別相乘得U 0 (s)U 0 (s) + U i (s)= Z1 Z 2R0 R0R2 即R0R3U 0
20���、 (s) + U i (s) = 01 + U i (s) = 0U 0 (s)Z1 Z 2 R2U 0 (s)Z1 Z 2 R2R所以:U i (s) = 0 1U 0 (s)Z1 Z 2 R2R3R+0R11R22U 0 (s) = 1= Z1 Z 2 R2= T1 s + 1 C2 sU (s)R 3R 3 + Z Z RR13i0+ 1Z1 Z 2 R23= R1 R201 2 231R T1 s + 1 C2 s(T1 s + 1)C2 sR0+ R1 R22-14 試參照例2-2給出的電樞控制直流電動(dòng)機(jī)的三組微分方程式���,畫出直流電動(dòng)機(jī)的結(jié)構(gòu)圖,并由結(jié)構(gòu)圖等效變換求 出電動(dòng)機(jī)的傳遞函
21���、數(shù) m (s) / U a (s) 和 m (s) / M c (s)解:由公式(2-2)���、(2-3)、(2-4)取拉氏變換U a (s) Ea (s) = IL s + Ra(s)Ea (s) = Ce m(s)aaCm I a (s) = M m (s)mM m (s) M c (s) = (s)J m s + f m得到系統(tǒng)結(jié)構(gòu)圖如下:McUa(s)1Ia(s)CmMm1m(s)Las+RaJms+fmCe m (s) =CmLa s + Ra1J m s + f m=CmU a (s)1 +Ce CmLa s + Ra1J m s + f m(La s + Ra )( J m s +
22���、f m ) + Ce Cm m (s) =M c (s)1 +1J m s + f mCe Cm1=La s + Ra(La s + Ra )( J m s + f m ) + Ce CmLa s + RaJ m s + f m2-15 某位置隨動(dòng)系統(tǒng)原理方塊圖如圖2-63所示���。已知電位器最大工作角度max= 330 o ,功率放大級(jí)放大系數(shù)為K3,要求:(1) 分別求出電位器傳遞系數(shù)K0���、第一級(jí)和第二級(jí)放大器的比例系數(shù)K1和K2���;(2) 畫出系統(tǒng)結(jié)構(gòu)圖���;(3) 簡(jiǎn)化結(jié)構(gòu)圖���,求系統(tǒng)傳遞函數(shù) 0 (s) / i (s) ���。圖2-63位置隨動(dòng)系統(tǒng)原理圖解:(1) K = 15V01650K = 3
23、0 = 3110K = 20 = 2210(2) e (s) = i (s) 0 (s)U s (s) = K 0 e (s)U a (s) = K1 K 2 K sU s (s)U a (s) = Ra I a (s) + La sI a (s) + Eb (s)M m (s) = Cm I a (s)00mcJs 2 (s) + fs (s) = M (s) M (s)系統(tǒng)結(jié)構(gòu)圖如下:Eb (s) = K b 0 (s)mMcie00K K KKUs1 2 s Ua Eb1Las+RaM10Js2+fsCmKb(3) 系統(tǒng)傳遞函數(shù) 0 (s) / i (s)CmK K K Ks(La s
24���、+ Ra )( Js + f )0 12sC KK K K K C 0 (s) =1 + m b s(La s + Ra )( Js + f ) 0 1 2 s m = s(La s + Ra )( Js + f ) + Cm K b i (s)1 + K K K KCms(La s + Ra )( Js + f )1 + K 0 K1 K 2 K s Cms(La s + Ra )( Js + f ) + Cm K b0 12sC K1 + m b s(La s + Ra )( Js + f )= K 0 K1 K 2 K s Cms(La s + Ra )( Js + f ) + Cm K
25���、 b + K 0 K1 K 2 K s Cm2-16 設(shè)直流電動(dòng)機(jī)雙閉環(huán)調(diào)速系統(tǒng)的原理線路如圖 2-64 所示:要求(1) 分別求速度調(diào)節(jié)器和電流調(diào)節(jié)器的傳遞函數(shù)(2) 畫出系統(tǒng)結(jié)構(gòu)圖(設(shè)可控硅電路傳遞函數(shù)為 K 3 /( 3 s + 1) ;電流互感器和測(cè)速發(fā)電機(jī)的傳遞函數(shù)分別為K 4 和 K 5 ���;直流電動(dòng)機(jī)的結(jié)構(gòu)圖用題 2-14 的結(jié)果)���;(3) 簡(jiǎn)化結(jié)構(gòu)圖,求系統(tǒng)傳遞函數(shù) (s) / U i (s)解:(1)速調(diào)U ST (s)= Z1R1 +=1C1 s= R1C1 s + 1 = T1 s + 1U i (s) U f (s)R流調(diào)R1R2 +RC1 sRC1 sU LT (s)=
26���、 Z 2 =C2 s= R2 C2 s + 1 = T2 s + 1U ST (s) U dlfk (s)RRRC2 sRC2 s(2)系統(tǒng)結(jié)構(gòu)圖如下:K4UiT1s+1RC1sUfUSTT2s+1RC2sULTK3Ua3s+1 Eb1MmCmLas+Ra IaCe1Jms+fmK5(3) 簡(jiǎn)化結(jié)構(gòu)圖���,求系統(tǒng)傳遞函數(shù) (s) / U i (s)因?yàn)榍笙到y(tǒng)傳遞函數(shù) (s) / U i (s) ���,所以令 M c = 0 ,系統(tǒng)結(jié)構(gòu)圖如下:K4UiT1s+1UfUSTT2s+1RC2sULTK33Ua Eb1Las+Ra Ia1Jms+fmCeK5將 K4 后移到輸出���,系統(tǒng)結(jié)構(gòu)圖化簡(jiǎn)如下:UiT1s
27���、+1RC1sUfUSTT2s+1RC2sULTK4K3Ua3s+1 Eb1Las+Ra IaJms+fmCmCmCe1Jms+fmK5進(jìn)一步化簡(jiǎn)得:UiT1s+1RC1sUSTT2s+1RC2sULTK4K3Ua3s+1Jms+fmCmCm(Las+Ra)(Jms+fm)+ Ce CmUfJms+fm2K5進(jìn)一步化簡(jiǎn)得:UiT1s+1RC1sUfK3 Cm (T2s+1)2CmRC2s (Las+Ra)(Jms+fm)+ Ce Cm(3s+1)+ K3 K4 Cm(Jms+fm)( T2s+1)K5進(jìn)一步化簡(jiǎn)得:UiK3 Cm 212(T s+1)( T s+1)2RC1s CmRC2s (L
28、as+Ra)(Jms+fm)+ Ce Cm(3s+1)+ K3 K4 Cm(Jms+fm)( T2s+1)+ K5 K3 Cm (T2s+1)( T1s+1)所以:(s) =U i (s)3 m21K C 2 (T s + 1)(T s + 1)RC1 sCmRC2s(La s + Ra)( Jm s + f m) + Ce Cm(3 s + 1)+ K 3 K4 Cm( J ms + f m)+ K 5K 3Cm(T2 s + 1)(T1 s + 1)2-17 已知控制系統(tǒng)結(jié)構(gòu)圖如圖2-65所示���。試通過結(jié)構(gòu)圖等效變換求系統(tǒng)傳遞函數(shù)C(s)/R(s)���。解:(a)圖2-65題2-17系統(tǒng)結(jié)構(gòu)圖R
29、(s)C(s) G1(s)G2(s)G2(s)G3(s)R(s)C(s) G1(s)G2(s)G2(s)G3(s)R(s)G1(s)+ G2(s)11+G2(s) G2(s)C(s)C (s)所以:=R(s)G1 + G21 + G2 G3(b)R(s)G1(s)G2(s)C(s)H1(s)1+ H1(s)H2(s)R(s)G1 (1+ H1H2)1+ H1H2- G1H1G2(s)C(s)C (s)所以:=R(s)G1G2 (1 + H1 H 2 )1 + H1 H 2 G1 H1(c)G3R(s)G1G21+G2H1C(s)H2R(s)G3G2G11+G2H1C(s)G1H2R(s)G1+
30���、G3G21+ G2H1+ G1G2H2C(s)C (s)所以:=R(s)G2 (G1 + G3 )1 + G2 H1 + G1G2 H 2(d)R(s)H2/G3C(s)G1G2G3H3H2R(s)H2/ G1G3G3C(s)G1G21+ G3H3H2R(s)H2/ G1G3G3G1G2C(s)C (s)所以:=R(s)1+ G1H1G1G2 G3(1 + G1 H1 )(1 + G3 H 3 ) + G2 H 21+ G3H3(e)R(s)C(s)G1G2H1/ G3G3H2+ H1/ G3G4R(s)G1G2G31+ G2G3H2+ H1G2C(s)H1/ G3G4R(s)G1G2G31+
31���、 G2G3H2+ H1G2- G1G2H1C(s)G4C (s)所以:=R(s)G4 +1 + G G HG1G2 G3+ H G G G H2 321 21 21(f)R(s)H1G1G1G2C(s)G3R(s)G1+G3G21+ G1G2H1C(s)C (s)(G + G )G所以:= 132R(s)1 + G1G2 H12-18 試簡(jiǎn)化圖2-66中的系統(tǒng)結(jié)構(gòu)圖,并求傳遞函數(shù)C(s)/R(s )和C(s)/N(s)���。解:(1)求C (s)R(s)時(shí)���, N = 0 這時(shí)結(jié)構(gòu)圖變?yōu)椋篏GRC12H1RG1G2C1+G1G2H1C (s)所以:=R(s)G1G21 + G1G2 H1 + G1G
32���、2(2)求C (s)N (s)時(shí), R = 0 這時(shí)結(jié)構(gòu)圖變?yōu)椋篊NG3G2G1H1進(jìn)一步化簡(jiǎn)得CNG3G2G1H1G1再進(jìn)一步化簡(jiǎn)得:NG2C G31+G1G2H1G1再進(jìn)一步化簡(jiǎn)得:NG2C G31+G1G2H11+G1G2H1G1G2再進(jìn)一步化簡(jiǎn)得:NG2C G31+G1G2H11+G1G2H1G1G2再進(jìn)一步化簡(jiǎn)得:NG2G3-1-G1G2H11+G1G2H1G2C G2+G1 (1+G1G2H1)所以:C (s)R(s)= G2 (G2 G3 1 G1G2 H1 )(1 + G1G2 H1 )G2 + G1 (1 + G1G2 H1 )解:(1)求圖2-66題2-18系統(tǒng)結(jié)構(gòu)圖C (
33���、s)時(shí), N = 0 這時(shí)結(jié)構(gòu)圖變?yōu)椋篟(s)G1G2R4G2GCG3G1G2R4G2+G3GCG1G2RC G2+G3G4G2+G3RG1G2+G2+G3G4C1+G4(G2+G3)所以:C (s)R(s)= G4 (G1G2 + G2 + G3 )1 + G4 (G2 + G3 )(2) 求C (s)N (s)時(shí)���, R = 0 這時(shí)結(jié)構(gòu)圖變?yōu)椋篘C G2G4G3NC G4G2+G3所以:C (s)R(s)= G41 + G4 (G2 + G3 )This is tri2a3l version胡壽松自動(dòng)控制原理習(xí)題解答第三章3-1 設(shè)隨動(dòng)系統(tǒng)的微分方程為:T&x&0 + x&0 = K 2
34���、uu = K1 r (t ) x f T f x& f+ x f= x0其中 T,Tf, K2 為正常數(shù)。如果在外作用 r(t)=1+t 的情況下���,使 x0 對(duì) r(t)的穩(wěn)態(tài)誤差不大于正常數(shù) 0 ,試問 k1 應(yīng)滿足什么條件���? 見習(xí)題 3-20 解答3-2 設(shè)系統(tǒng)的微分方程式如下:(1)0.2c&(t) = 2r (t )(2) 0.04c& (t) + 0.24c&(t ) + c(t ) = r (t )試求系統(tǒng)的單位脈沖響應(yīng) k(t)和單位階躍響應(yīng) h(t)。已知全部初始條件為零���。解:(1) 因?yàn)?0.2sC(s) = 2R(s)單位脈沖響應(yīng): C(s) = 10 / sk (t) =
35���、 10t 0單位階躍響應(yīng) h(t) C(s) = 10 / s 2(2) (0.04s 2 + 0.24s + 1)C(s) = R(s)h(t) = 10tC(s) =t 0R(s)0.04s 2 + 0.24s + 1單位脈沖響應(yīng): C (s) =0.04s 21+ 0.24s + 1k (t) =25 e33tsin 4t單位階躍響應(yīng) h(t)C(s) =2512s + 62s( s + 3)h(t) = 1 e 3t cos 4t 3 e 3t sin 4t4+ 16s(s + 3)+ 163-3 已知系統(tǒng)脈沖響應(yīng)如下���,試求系統(tǒng)閉環(huán)傳遞函數(shù)()���。(1) k (t ) = 0.0125e
36���、 1.25t(2) k (t ) = 5t + 10 sin(4t + 450 )(3) k (t ) = 0.1(1 e t / 3 ) 解:(1) (s) =0.0125s + 1.25(2) k (t) = 5t + 10 sin 4t cos 450 + 10 cos 4t sin 450(s) = 5 + 5s 224+ 5s 2 + 162s= 5 + 5s 2 + 16s 22 s + 4s 2 + 16(3) (s) =0.1 s0.1s + 1 / 33-4 已知二階系統(tǒng)的單位階躍響應(yīng)為h(t ) = 10 12.5e 1.2t sin(1.6t + 53.1o )試求系統(tǒng)的
37���、超調(diào)量、峰值時(shí)間p 和調(diào)節(jié)時(shí)間s���。解: h(t) = 1 11 2e n t sin(1 2 n t + ) = arccos % = e /1 2t p =21 nt = 3.5ns = cos = cos 53.10 = 0.6 % = e /1 2= e 0.6 /10.62= e 0.6 /10.62= 9.5%t p =n1 2 = 1.6= 1.96(s)ts =3.5n= 3.5 = 2.92(s)1.23-5 設(shè)單位反饋系統(tǒng)的開環(huán)傳遞函數(shù)為G(s) =0.4s + 1s(s + 0.6)試求系統(tǒng)在單位階躍輸入下的動(dòng)態(tài)性能���。解:閉環(huán)傳遞函數(shù)GB (s) =G(s)=0.4s +
38、1=s(s + 0.6)0.4s + 121 + G(s)1 + 0.4s + 1s + s + 1s(s+ 0.6)C(s) = G(s)R(s) = 10.4s + 1 =0.4+1Bs s 2 + s + 1s 2 + s + 1s(s 2 + s + 1)=0.4s 2 + s + 1+ 1 ss + 1s 2 + s + 1= 1 ss + 0.6s 2 + s + 1c(t) = 1 e 0.5t cos3 t 2 0.6 e 0.5t sin3 t2= 1 1.22e 0.5t sin(323 t + 55.30 )2h(t) = 1 11 2e n t sin(1 2 n t
39���、+ ) = arccos % = e /1 2t p =21 nt = 3.5ns = cos = cos 55.30 = 0.569 % = e /1 2= 11.37% 2t p =n1 2 = 3.63s3t = 3.5ns= 3.5 = 7s0.53-6 已知控制系統(tǒng)的單位階躍響應(yīng)為h(t ) = 1 + 0.2e 60t 1.2e 10t試確定系統(tǒng)的阻尼比和自然頻率���。解: 求拉氏變換得H (s) = 1 +s0.2s + 601.2=s + 10(s + 60)(s + 10) +s(s + 60)(s + 10)0.2s(s + 10)s(s + 60)(s + 10)1.2s(s
40、 + 60)s(s + 60)(s + 10)=600=600 2nn= n s(s + 60)(s + 10)s(s 2 + 70s + 600) 2s(s 2 + 2s + 2 )顯然閉環(huán)傳遞函數(shù)為 n n(s 2 + 2s + 2 )n其中 2 = 600根據(jù)(3-17) n = 10 6n2 n= 70 =72 6h(t) = 1 +e t / T1+T2 / T1 1e t / T12T1 / T2 1解:根據(jù)公式(3-17)h(t) = 1 + te T1 te T2+T1 =T2 / T1 11T1 / T2 11T2 = n ( 1 2 1)n ( +1 2 1)顯然:T1 =10T2 =60 T1 = +T2 2 1 2 11 += 6 =1 1 1 21 1 2解方程得 =72 6由T1 = n ( 1= 1 2 1)102得到 n (
 自動(dòng)控制原理胡壽松第5版課后習(xí)題及答案完整.doc
自動(dòng)控制原理胡壽松第5版課后習(xí)題及答案完整.doc