《安徽省2019中考數(shù)學(xué)決勝二輪復(fù)習(xí) 專題五 運(yùn)動(dòng)變化問題習(xí)題》由會(huì)員分享�����,可在線閱讀����,更多相關(guān)《安徽省2019中考數(shù)學(xué)決勝二輪復(fù)習(xí) 專題五 運(yùn)動(dòng)變化問題習(xí)題(4頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
1��、專題五 運(yùn)動(dòng)變化問題
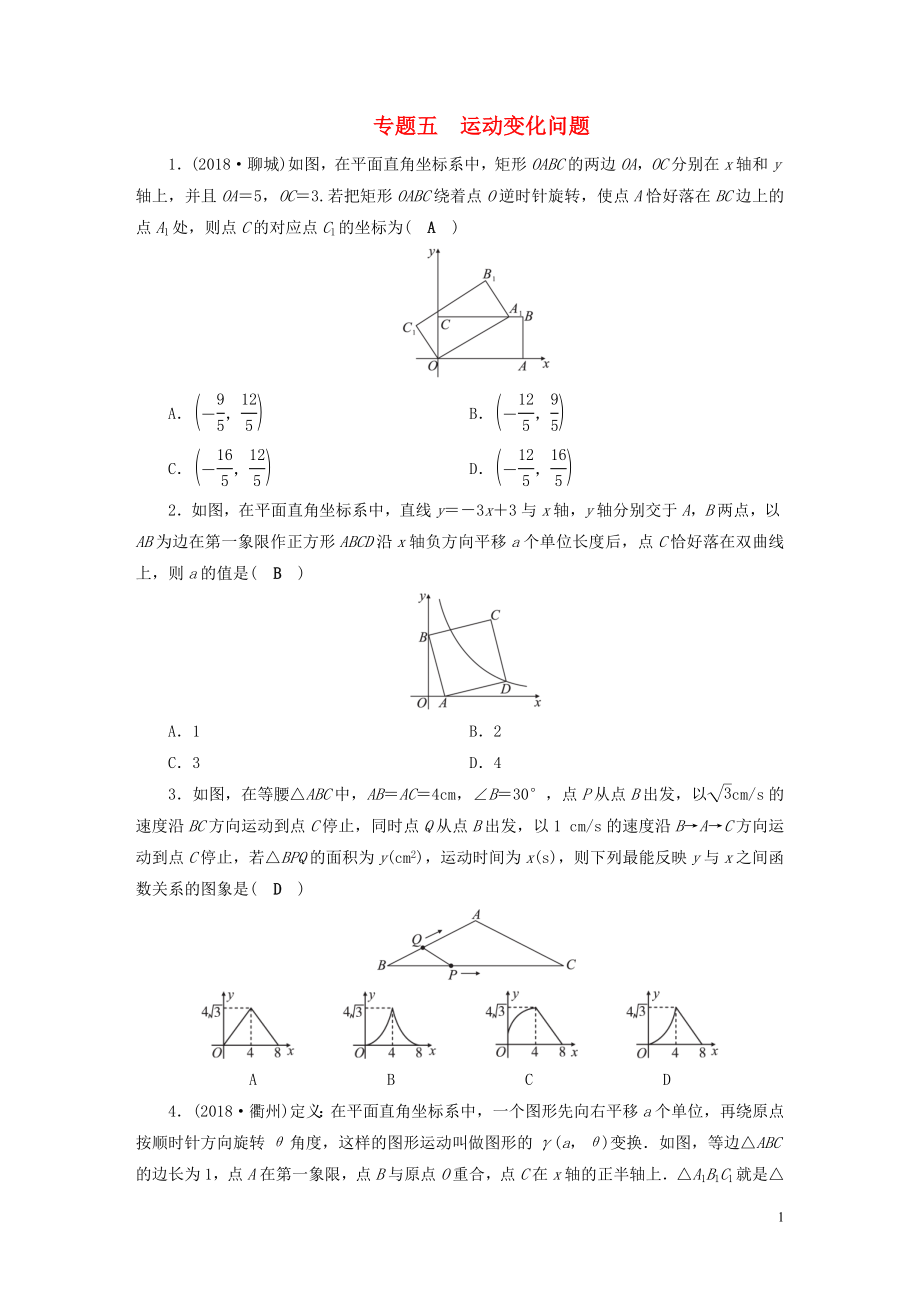
1.(2018·聊城)如圖���,在平面直角坐標(biāo)系中����,矩形OABC的兩邊OA����,OC分別在x軸和y軸上,并且OA=5���,OC=3.若把矩形OABC繞著點(diǎn)O逆時(shí)針旋轉(zhuǎn)�����,使點(diǎn)A恰好落在BC邊上的點(diǎn)A1處���,則點(diǎn)C的對(duì)應(yīng)點(diǎn)C1的坐標(biāo)為( A )
A. B.
C. D.
2.如圖�,在平面直角坐標(biāo)系中���,直線y=-3x+3與x軸�����,y軸分別交于A,B兩點(diǎn)��,以AB為邊在第一象限作正方形ABCD沿x軸負(fù)方向平移a個(gè)單位長度后����,點(diǎn)C恰好落在雙曲線上,則a的值是( B )
A.1 B.2
C.3 D.4
3.如圖���,在等腰△ABC中����,AB=AC=4 cm��,∠B=30°,點(diǎn)P從
2����、點(diǎn)B出發(fā),以 cm/s的速度沿BC方向運(yùn)動(dòng)到點(diǎn)C停止�����,同時(shí)點(diǎn)Q從點(diǎn)B出發(fā)�����,以1 cm/s的速度沿B→A→C方向運(yùn)動(dòng)到點(diǎn)C停止����,若△BPQ的面積為y(cm2),運(yùn)動(dòng)時(shí)間為x(s)�,則下列最能反映y與x之間函數(shù)關(guān)系的圖象是( D )
A B C D
4.(2018·衢州)定義:在平面直角坐標(biāo)系中,一個(gè)圖形先向右平移a個(gè)單位����,再繞原點(diǎn)按順時(shí)針方向旋轉(zhuǎn)θ角度,這樣的圖形運(yùn)動(dòng)叫做圖形的γ(a�����,θ)變換.如圖,等邊△ABC的邊長為1���,點(diǎn)A在第一象限��,點(diǎn)B與原點(diǎn)O重合�,點(diǎn)C在x軸的正半軸上.△A1B1C1就是△ABC經(jīng)γ(1
3�、,180°)變換后所得的圖形.
若△ABC經(jīng)γ(1,180°)變換后得△A1B1C1,△A1B1C1經(jīng)γ(2,180°)變換后得△A2B2C2��,△A2B2C2經(jīng)γ(3,180°)變換后得△A3B3C3��,依此類推……
△An-1Bn-1Cn-1經(jīng)γ(n,180°)變換后得△AnBnC�,則點(diǎn)A1的坐標(biāo)是____����,點(diǎn)A2018的坐標(biāo)是____.
5.(改編題)如圖,線段AB經(jīng)過平移得到線段A1B1��,其中A�,B的對(duì)應(yīng)點(diǎn)分別為A1,B1�����,這四個(gè)點(diǎn)都在格點(diǎn)上,若線段AB上有一個(gè)點(diǎn)P(a�����,b)�,則點(diǎn)P在A1B1上的對(duì)應(yīng)點(diǎn)P1的坐標(biāo)為__(a-4,b+2)__.
6.(原創(chuàng)題)如圖����,點(diǎn)M的坐標(biāo)
4、為(3,2)���,動(dòng)點(diǎn)P從點(diǎn)O出發(fā)����,沿y軸以每秒1個(gè)單位的速度向上移動(dòng)��,且過點(diǎn)P的直線l:y=-x+b也隨之移動(dòng)�,若點(diǎn)M關(guān)于l的對(duì)稱點(diǎn)落在坐標(biāo)軸上,設(shè)點(diǎn)P的移動(dòng)時(shí)間為t��,則t的值是__2或3__.
7.(改編題)如圖�,在平面直角坐標(biāo)系中,O為原點(diǎn)�����,已知A(0,8),D(24,8)�,C(26,0),動(dòng)點(diǎn)P從點(diǎn)A開始沿AD邊向點(diǎn)D以1 cm/s的速度運(yùn)動(dòng)����;動(dòng)點(diǎn)Q從點(diǎn)C開始沿CO邊向點(diǎn)O以3 cm/s的速度運(yùn)動(dòng),若P�����,Q分別從點(diǎn)A����,C同時(shí)出發(fā),當(dāng)其中一點(diǎn)到達(dá)端點(diǎn)時(shí)����,另一點(diǎn)也隨之停止運(yùn)動(dòng).
(1)求經(jīng)過多少時(shí)間后����,四邊形PQCD為平行四邊形;
(2)當(dāng)四邊形PQCD為平行四邊形時(shí)���,求PQ所在直線
5����、的函數(shù)解析式.
解:(1)設(shè)t秒后四邊形PQCD為平行四邊形,∵當(dāng)PD=QC時(shí)���,四邊形PQCD為平行四邊形��,∴24-t=3t�����,解得�,t=6��;
(2)6秒后�,點(diǎn)P的坐標(biāo)為(6,8),點(diǎn)Q的坐標(biāo)為(8,0)�����,設(shè)直線PQ的解析式為y=kx+b��,由題意�����,得解得∴直線PQ的解析式為y=-4x+32.
8.某校機(jī)器人興趣小組在如圖①所示的矩形場地上開展訓(xùn)練.機(jī)器人從點(diǎn)A出發(fā),在矩形ABCD邊上沿著A→B→C→D的方向勻速移動(dòng)����,到達(dá)點(diǎn)D時(shí)停止移動(dòng).已知機(jī)器人的速度為1個(gè)單位長度/s,移動(dòng)至拐角處調(diào)整方向需要1 s(即在B��,C處拐彎時(shí)分別用時(shí)1 s).設(shè)機(jī)器人所用時(shí)間為t(s)時(shí)���,其所在位置用點(diǎn)P表
6����、示��,P到對(duì)角線BD的距離(即垂線段PQ的長)為d個(gè)單位長度��,其中d與t的函數(shù)圖象如圖②所示.
(1)求AB���,BC的長�;
(2)如圖②�,點(diǎn)M�����,N分別在線段EF,GH上����,線段MN平行于橫軸,M���,N的橫坐標(biāo)分別為t1�����,t2.設(shè)機(jī)器人用了t1(s)到達(dá)點(diǎn)P1處���,用了t2(s)到達(dá)點(diǎn)P2處(見圖①).若CP1+CP2=7,求t1�����,t2的值.
解:(1)作AT⊥BD�����,垂足為T,由題意得����,AB=8,AT=����,在Rt△ABT中,AB2=BT2+AT2�����,∴BT=.∵tan∠ABD==�,∴AD=6,即BC=6���;
(2)在圖①中����,連接P1P2����,過點(diǎn)P1,P2分別作BD的垂線�����,垂足為Q1�,Q2,則P1Q
7���、1∥P2Q2�,∵在圖②中��,線段MN平行于橫軸����,∴d1=d2,即P1Q1=P2Q2��,∴P1P2∥BD����,∴=,即=��,又∵CP1+CP2=7�,∴CP1=3,CP2=4.設(shè)M��,N的橫坐標(biāo)分別為t1,t2�����,由題意得���,CP1=15-t1�����,CP2=t2-16�,∴t1=12�,t2=20.
9.(2018·綿陽)如圖,已知△ABC的頂點(diǎn)坐標(biāo)分別為A(3,0)��,B(0,4)����,C(-3,0).動(dòng)點(diǎn)M,N同時(shí)從A點(diǎn)出發(fā)����,M沿A→C,N沿折線A→B→C�����,均以每秒1個(gè)單位長度的速度移動(dòng),當(dāng)一個(gè)動(dòng)點(diǎn)到達(dá)終點(diǎn)C時(shí)��,另一個(gè)動(dòng)點(diǎn)也隨之停止移動(dòng)�����,移動(dòng)的時(shí)間記為t秒.連接MN.
(1)求直線BC的解析式���;
(2)移動(dòng)過程中,將
8��、△AMN沿直線MN翻折���,點(diǎn)A恰好落在BC邊上點(diǎn)D處��,求此時(shí)t值及點(diǎn)D的坐標(biāo)�����;
(3)當(dāng)點(diǎn)M��,N移動(dòng)時(shí)����,記△ABC在直線MN右側(cè)部分的面積為S,求S關(guān)于時(shí)間t的函數(shù)關(guān)系式.
解:(1)設(shè)直線BC的解析式為y=kx+b.∵直線經(jīng)過B(0,4)�,C(-3,0),∴解得∴直線BC的解析式為y=x+4.
(2)過點(diǎn)D作DE⊥AC�����,如圖�����,∵點(diǎn)M和點(diǎn)N均以每秒1個(gè)單位長度的速度移動(dòng)���,∴AM=AN=t���,∵A(3,0),B(0,4)���,∴OA=3�����,OB=4�����,AB=5����,∴BN=5-t,∵△DMN是△AMN沿直線MN翻折得到的�����,∴DN=DM=t��,∴四邊形DMAN是菱形���,∴DN∥AC,∴=�����,∴=��,解得:t=����,∴CD=��,∵B(0,4)����,C(-3,0)�,∴OC=3,OB=4����,BC=5,∴sin∠BCO==��,cos∠BCO==���,∴DE=CD·sin∠BCO=×=���,CE=CD·cos∠BCO=×=,∴OE=���,∴點(diǎn)D的坐標(biāo)為�;
(3)當(dāng)0≤t≤5時(shí)�,S=t2;當(dāng)5<t≤6時(shí)S=S△ABC-(6-t)·(10-t)·sin∠BCO=12-(t2-16t+60)=-t2+t-12.
4
 安徽省2019中考數(shù)學(xué)決勝二輪復(fù)習(xí) 專題五 運(yùn)動(dòng)變化問題習(xí)題
安徽省2019中考數(shù)學(xué)決勝二輪復(fù)習(xí) 專題五 運(yùn)動(dòng)變化問題習(xí)題